PICkit 2を購入
2009年6月21日
先日、サンフランシスコの紀伊国屋に行ったとき、何気なく手にしたトランジスタ技術・2009年4月号。そこでの特集が、『これなら分かる!!PICマイコン』。以前から、PICでもAVRでもなんでもいいから、マイクロコントローラを使えるようにならにゃイカンなと思っていて、その機会がなかったのだが、これを機に勉強することにした。
トラ技をよむと、Cでプログラムが組めるではないか!しかも、HITEC-C liteというのを用いれば、すべてフリーソフトでできる。これはいい。アセンブラも楽しいが、Cで組めるとなると、やりたいことがすぐにコードになるという利点がある。
Microchip社が、これもフリーで出しているMPLAB IDEと、HITEC-Cを用いてトラ技を見ながら始めて書いたコードは以下のとおり。
main()関数の中に色々と書けば、色々とできる。簡単・簡単。
早速、手作りコンピューターでのとりあえずの目標である、円周率の計算を行うマイコンを製作した。アルゴリズムは、Jeans & Developmentに書いたとおり。
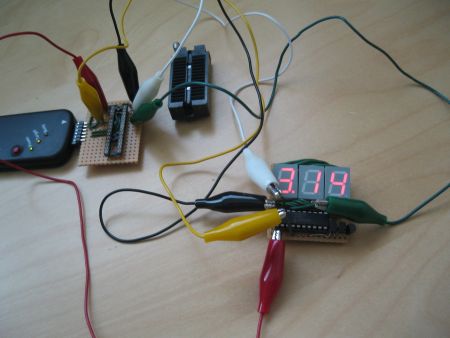
PICのほうの技術としては、タイマー割り込みとLEDのダイナミック点灯を利用している。これらの詳しい解説は、トラ技に載っている。回路も、3つの7セグメントLEDを点灯させるだけの簡単なものなので、割愛。下の写真は、できた回路を、PICkit 2につないでいるところ。
プログラムは以下のようになった。
PICkitからはずして、6V電源だけを供給して実行させると、以下のとおり。
トラ技をよむと、Cでプログラムが組めるではないか!しかも、HITEC-C liteというのを用いれば、すべてフリーソフトでできる。これはいい。アセンブラも楽しいが、Cで組めるとなると、やりたいことがすぐにコードになるという利点がある。
Microchip社が、これもフリーで出しているMPLAB IDEと、HITEC-Cを用いてトラ技を見ながら始めて書いたコードは以下のとおり。
#include <pic.h>
__CONFIG(INTIO & WDTDIS & PWRTDIS & MCLRDIS & UNPROTECT & BORDIS & IESODIS & FCMDIS);
void main(){
}main()関数の中に色々と書けば、色々とできる。簡単・簡単。
早速、手作りコンピューターでのとりあえずの目標である、円周率の計算を行うマイコンを製作した。アルゴリズムは、Jeans & Developmentに書いたとおり。
PICのほうの技術としては、タイマー割り込みとLEDのダイナミック点灯を利用している。これらの詳しい解説は、トラ技に載っている。回路も、3つの7セグメントLEDを点灯させるだけの簡単なものなので、割愛。下の写真は、できた回路を、PICkit 2につないでいるところ。
プログラムは以下のようになった。
#include <pic.h>
__CONFIG(INTIO & WDTDIS & PWRTDIS & MCLRDIS & UNPROTECT & BORDIS & IESODIS & FCMDIS);
unsigned char led7(char num){
unsigned char ret=0xFF;
if (num & 0x10) ret=0xF7;
switch (num & 0x0F) {
case 0: return ret & 0x28;
case 1: return ret & 0x7B;
case 2: return ret & 0x1C;
case 3: return ret & 0x19;
case 4: return ret & 0x4B;
case 5: return ret & 0x89;
case 6: return ret & 0x88;
case 7: return ret & 0x2B;
case 8: return ret & 0x08;
case 9: return ret & 0x09;
default: return 0xff;
}
}
// 10000 cycles @ 8 MHz / 4 == 5 ms
#define WAIT_CYCLE (10000-23)
#define TMR1H_INIT ((unsigned char)(((unsigned short)(65536-WAIT_CYCLE))>>8))
#define TMR1L_INIT ((unsigned char)(((unsigned short)(65536-WAIT_CYCLE))&0x00ff))
unsigned char g_ledp=0;
unsigned short g_num=0;
void interrupt int_function (void) {
if (!TMR1IF) return;
TMR1H=TMR1H_INIT;
TMR1L=TMR1L_INIT;
TMR1IF=0;
if (++g_ledp==3) g_ledp=0;
PORTA=0x00;
switch (g_ledp) {
case 0:
PORTC=led7(0x10 | g_num / 100);
PORTA=0x04;
break;
case 1:
PORTC=led7(( g_num / 10 ) % 10);
PORTA=0x10;
break;
case 2:
default:
PORTC=led7(g_num % 10);
PORTA=0x20;
break;
}
}
void delay(){
unsigned char c1,c2;
for (c1=0;c1<255;c1++) for (c2=0;c2<255;c2++);
}
float calc_pi(unsigned long max){
unsigned long total=0;
unsigned long max2=max*max;
unsigned long prev_y=max-1;
unsigned long x,y,max2_x2;
for (x=0;x<max;x++) {
max2_x2=max2-x*x;
for (y=prev_y;0<=y;y--) {
if (y*y<max2_x2) break;
}
total+=y+1;
prev_y=y;
}
return ((float)total/(float)max2)*4;
}
void main(){
// CLK=8 MHz
OSCCON=0x70;
// All output
TRISA=0;
TRISB=0;
TRISC=0;
// Non-analog mode
ANSEL=0x00;
ANSELH=0x00;
// Scaler 1:1
T1CON=0x00;
// Reset timer
TMR1H=0x00;
TMR1L=0x00;
// Clear flag
TMR1IF=0;
// Enable interrupt
TMR1IE=1;
PEIE=1;
GIE=1;
// Start timer
TMR1ON=1;
unsigned long max;
float pi;
for(max=1;max<8192;max*=2){
pi=calc_pi(max);
g_num=(unsigned short)(pi*100);
delay();
}
while(1);
}PICkitからはずして、6V電源だけを供給して実行させると、以下のとおり。